









제어 시스템 이상으로 비행중 기체 요동
내비게이션 사진 한 장 사라진 것이 원인
오류 허용치 둔 설계 덕분에 무사히 착륙
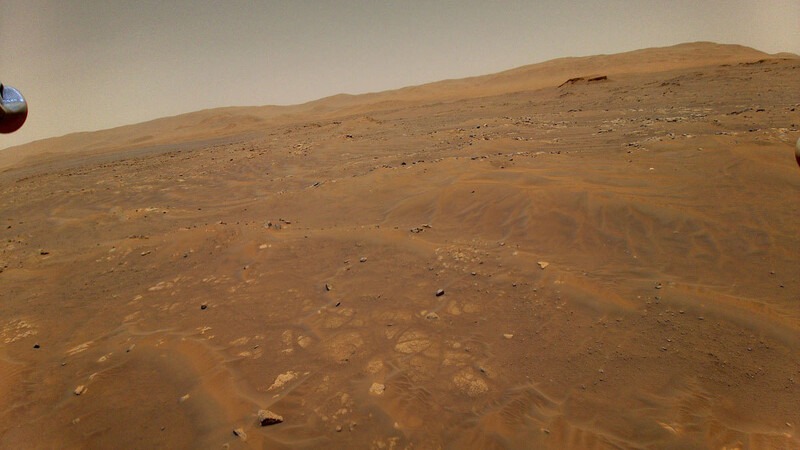
지난 22일 6번째 비행에 나선 인지뉴이티가 10미터 상공에서 촬영한 화성. 나사 제공
다섯번의 시험 비행을 마치고 첫 시범 임무 수행에 나선 화성 헬리콥터 인지뉴이티가 기체가 요동을 치는 위태로운 순간을 견뎌내고 무사히 비행을 마쳤다.
미국 항공우주국(나사)은 27일 인지뉴이티가 화성 체류 91일째인 지난 22일 비행 영역을 넓혀 서쪽 관심 지역의 입체 이미지를 촬영하는 임무에 나섰다고 밝혔다.
나사는 이날로 6번째 비행에 나선 인지뉴이티에 고도 10미터까지 상승한 뒤 초당 4미터의 속도로 남서쪽 방향으로 150미터를 이동하도록 지시했다. 이 지점에 도착하면 남쪽 방향으로 15미터를 비행하면서 지상을 촬영한 뒤 북동쪽으로 다시 50미터를 날아가 착륙하는 것이 이날의 임무였다.
비행은 순조롭게 시작됐다. 그러나 임무 수행 목적지인 150미터 지점에 거의 다다라, 인지뉴이티의 기체가 무슨 연유에선가 앞뒤로 흔들리기 시작했다. 이런 동작은 이후 비행 중 내내 지속됐다. 나사가 탑재된 센서의 기록을 확인한 결과, 착륙하기 전 기체는 20도 이상 요동을 치고 전력소비량이 치솟았던 것으로 나타났다.

화성 헬리콥터 인지뉴이티 6번째 비행의 마지막 29초. 기체가 심하게 흔들리고 있음을 알 수 있다.
무슨 문제가 생겼을까?
인지뉴이티는 내장된 관성측정장비(IMU)가 기록하는 가속 및 회전 속도 데이터와 내비게이션 카메라가 촬영하는 지형 이미지 데이터를 비교 분석해 비행을 자동 제어하는 시스템을 갖고 있다. 내비게이션 카메라는 초당 30장의 사진을 찍는다.
그런데 비행 시작 54초 뒤 사진이 제어 시스템에 전달되는 과정에서 작은 결함이 발생해 사진 한 장이 사라졌다. 더 중요한 건, 이 때문에 이후 모든 이미지들의 촬영 시간 기록이 부정확해졌다는 점이다. 이 시점부터 비행 제어 알고리즘은 이 부정확한 정보를 바탕으로 작동했다.
실제 상황과 정보가 일치하지 않음에 따라 게속해서 비행값을 수정하는 작업이 이어지면서 기체가 요동을 친 것이다.

6번째 비행 다음날 퍼시비런스에서 촬영한 인지뉴이티. 나사 제공
그럼에도 인지뉴이티의 비행이 중단되지는 않았다. 다만 애초 예정했던 지점에서 약 5미터 떨어진 곳에 착륙했다. 나사는 “이는 시차를 포함해 어느 정도의 오류가 발생하더라도 이를 수용할 수 있는 ‘안정 범위’를 두도록 제어 시스템을 설계한 덕분”이라고 설명했다. 또 착륙 단계에선 내비게이션 카메라가 작동을 중단하도록 설계한 것도 무사히 비행을 마치는 데 중요한 역할을 했다고 나사는 덧붙였다.
마지막 순간에 카메라 이미지가 중단되자, 잘못된 정보 탓에 요동치던 기체가 정상적인 자세를 회복하면서 안전하게 착륙할 수 있었다는 것이다.
나사는 인지뉴이티가 이번 비행을 통해 어려운 상황을 헤쳐나가는 능력을 발휘함으로써 비행 제어 시스템이 얼마나 견고한지 확인하는 성과를 거뒀다고 밝혔다. 곽노필 기자
'● 경제 & 과학' 카테고리의 다른 글
| 중국, '우주 정거장 건설'…우주인 3명 태운 선저우 12호 발사 (0) | 2021.06.19 |
|---|---|
| 7월, 우주여행 시동…첫 준궤도 관광 티켓 312억원 낙찰 (0) | 2021.06.14 |
| “보수가 진보보다 가짜뉴스에 더 취약하다” (0) | 2021.06.06 |
| 한국, 우주클럽 '아르테미스 약정' 서명…10번째 참여국 (0) | 2021.05.27 |
| 중 우주정거장 로봇팔 '20t 번쩍' …"미국, 자국 위성 공격 우려" (0) | 2021.05.24 |
| 추락하는 비트코인, 바닥은 언제?... 역대 4차례 ‘폭락’ 보면... (0) | 2021.05.24 |
| 서울 면적 7배 넘는 빙산, 남극 바다에서 떨어져 나와 (0) | 2021.05.22 |




























